This post covers a free tool to visualize pathfinding algorithms on real map. Pathfinding algorithms are designed to find an optimal path from a source to a destination. There are various pathfinding algorithms that use different approaches to the problem. The goal of the algorithms is to avoid the obstacles and minimize the cost (like distance, risk, price, etc.). These algorithms are commonly used in navigation systems, games, and other applications that require efficient route planning.
Map Pathfinding Visualizer is a free allows you to visualize pathfinding algorithms on a real map anywhere in the world. The project is hosted on GitHub where you can access its source code along with more information. This tool covers a map of various cities around the world where you can visualize various pathfinding algorithms covering A*, Greddy, Dijkstra’s, and Bidirectional Search. The tool plays an animation of the visualization that you can repeat step by step.
Check out our other posts to learn how to Generate Interactive Maps Online using OpenAI and Download all Google Maps Search Results.
Visualize Pathfinding Algorithms on Real Map
To visualize pathfinding algorithms on a real map, visit Map Pathfinding Visualizer here. The tool opens up with a map of London that you can change from the settings. Simply click the settings icon from the left side and change the city from the Locations. In the same settings, you can pick the pathfinding algorithm as well.

Use the left-click on your mouse cursor to place the start node on the map. Placing the start node shows a radius around it. The end node of the path should be within this radius (you can change the radius limit from the settings). Then use the right-click to place the end node on the map. After placing both nodes, click the play button from the top to start the pathfinding visualization. Depending on the selected algorithm, it plots the ways on the map and finds a path between the start node and the end node.
The tool covers the following pathfinding algorithms:
- A* Algorithm: It finds the shortest path between two points.
- Greddy Algorithm: It selects the locally optimal choice at each step in the search for a solution, aiming to find the global optimum without backtracking.
- Dijkstra’s Algorithm: It finds the shortest path between two nodes by iteratively selecting the vertex with the smallest tentative distance from the source.
- Bidirectional Search Algorithm: It finds the shortest path between two graph vertices by simultaneously searching forward from the source node and backward from the goal node.
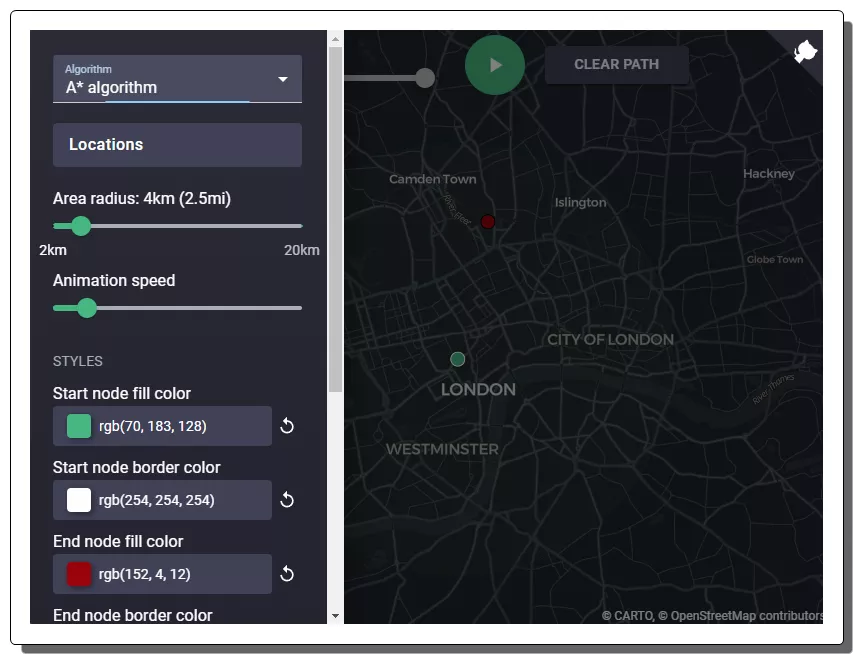
You can choose the desired algorithm for your visualization. You can also area radius for the visualization. However, the more you increase the radius the more time it takes to load the map. Apart from that, you can also set the pathfinding animation speed and change the colors of the start node, end node, path, etc.
You can give it a try here.
Closing Words
The Map Pathfinding Visualizer provides a free resource for visualizing various pathfinding algorithms on a real map. It allows users to explore and understand pathfinding algorithms in a practical and interactive way. It can also serve as an educational and insightful tool for those interested in route planning and navigation algorithms.
{kind=link}